Actuador electrico Lineal
- Obtener enlace
- X
- Correo electrónico
- Otras aplicaciones
¿Qué es un actuador lineal eléctrico?
Un actuador lineal eléctrico es un dispositivo que convierte el movimiento rotatorio de un motor en movimiento lineal. Se puede integrar en cualquier equipo para empujar, tirar, levantar, bajar, posicionar o girar una carga.
TiMOTION se especializa en actuadores eléctricos y sistemas de movimiento para aplicaciones médicas, industriales, domésticas y de oficina.
Un actuador lineal electromecánico tiene muchos componentes y opciones. Gracias a la integración vertical, TiMOTION diseña, fabrica y personaliza todos estos componentes, incluyendo motores, tornillos sin fin y tuercas, de acuerdo con sus clientes y sus aplicaciones.
Inyectamos nuestras propias piezas de plástico, así como nuestras tarjetas electrónicas para garantizar la calidad y la durabilidad de nuestros productos. Podemos optimizar los programas e integrar los diferentes movimientos necesarios para una aplicación. Por ejemplo, es posible obtener el movimiento sincronizado de dos actuadores eléctricos por medio de la información de la posición.
Los diferentes tipos de actuadores eléctricos
TiMOTION diseña y fabrica diferentes tipos de actuadores lineales eléctricos, todos ellos intercambiables y personalizables según las necesidades y la aplicación del cliente.
1. Actuadores eléctricos paralelos
El motor es paralelo al tornillo sin fin. Los actuadores eléctricos paralelos suelen ser impulsados por engranajes rectos que ofrecen más opciones de variación de velocidades. Estos actuadores permiten un mayor rango de cargas y velocidades, pero son menos silenciosos que los actuadores equipados con engranajes helicoidales. Algunos ejemplos de actuadores paralelos de TiMOTION: MA2, MA5, TA2P.

2. Actuadores eléctricos en ángulo recto o en forma de "L"
El motor se coloca perpendicularmente al tornillo sin fin. Los actuadores eléctricos en L suelen ser impulsados por engranajes helicoidales. Estos actuadores ofrecen menos opciones de variación de velocidades que los motores de engranajes rectos y, por lo tanto, son menos eficientes, pero son más silenciosos y ofrecen una mayor fuerza de autobloqueo. Algunos ejemplos de actuadores de ángulo recto de TiMOTION: TA43, TA23, TA31, TA37.

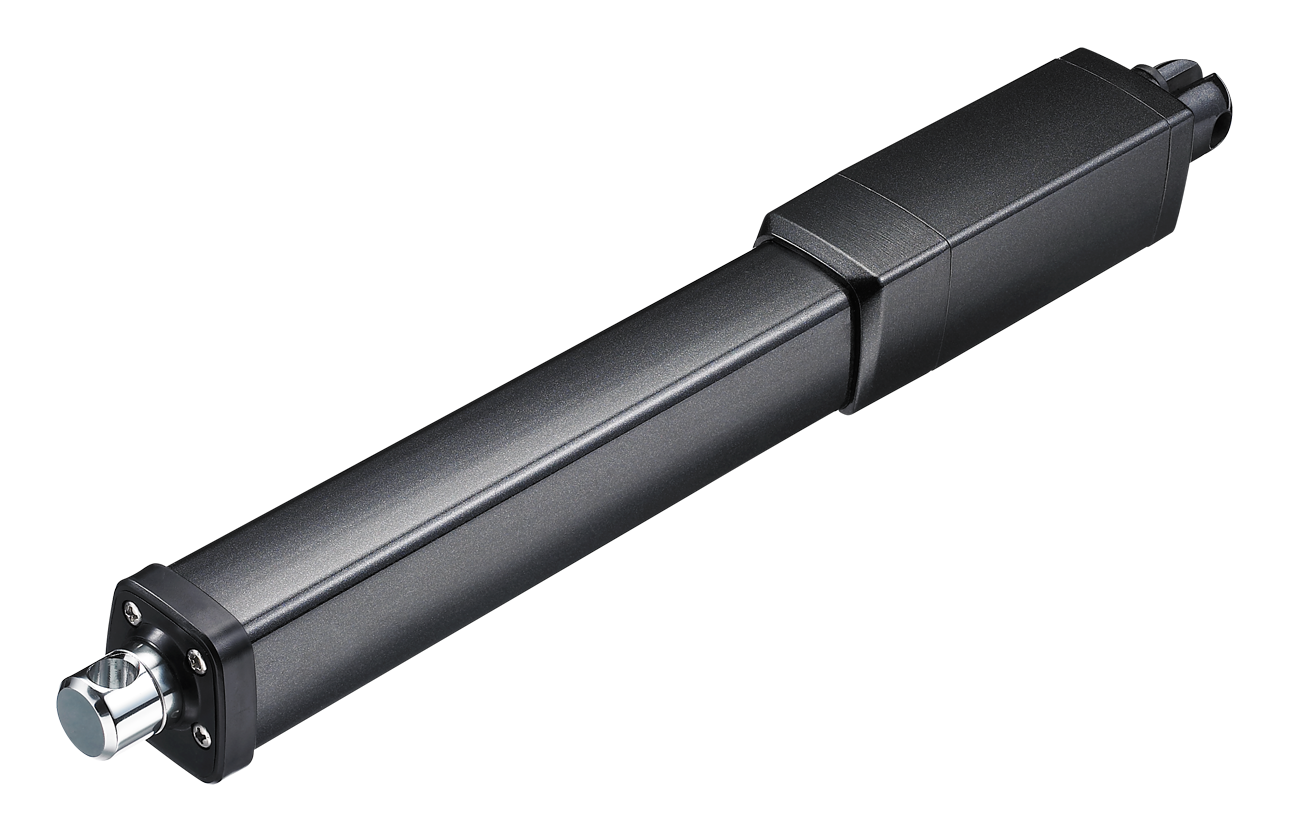
3. Actuadores eléctricos en paralelo
El motor está en paralelo con el tornillo sin fin. Por lo tanto, los actuadores eléctricos en paralelo tienen una mayor longitud de retracción. Normalmente son impulsados por un conjunto de engranajes planetarios y están diseñados específicamente para adaptarse a espacios reducidos. Sin embargo, su nivel de ruido es más alto. Algunos ejemplos de actuadores en paralelo de TiMOTION: JP3, JP4.
4. Motorreductores
Los motorreductores permiten el diseño de sistemas económicos y versátiles cuando se combinan con uno o más tornillos sin fin. Compactos, suelen ser impulsados por engranajes helicoidales y son una opción ideal para lograr la sincronización mecánica. Algunos ejemplos de motorreductores TiMOTION: TGM1, TGM2, TGM3, TGM4, TGM5 y TGM7.

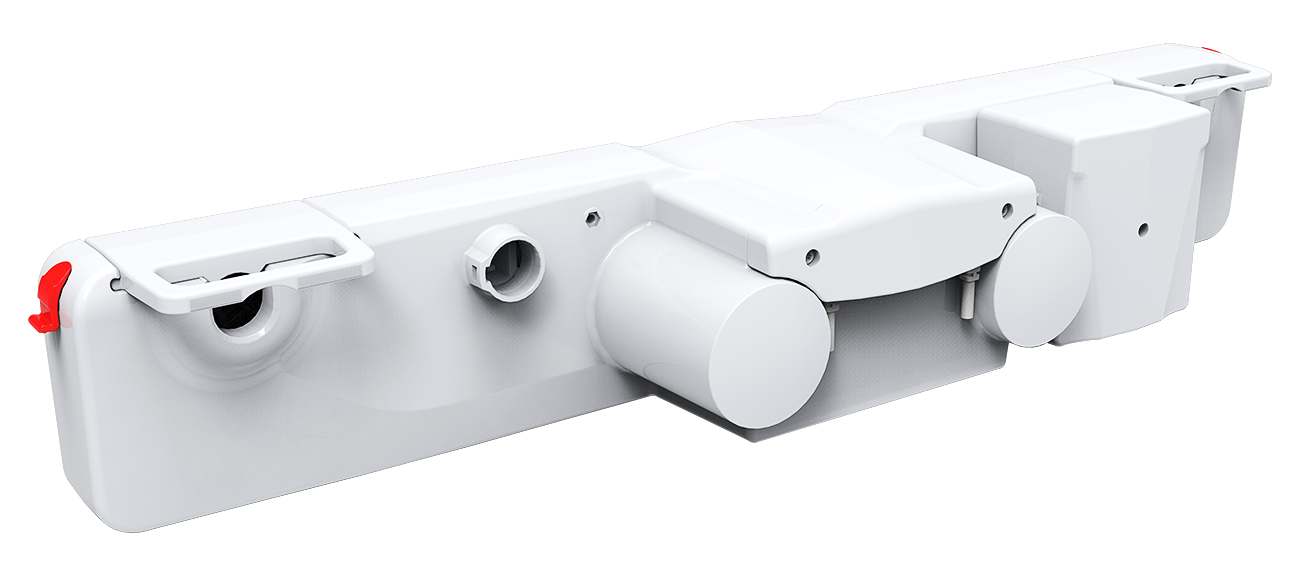
5. Motores dobles
Los motores dobles se mueven en dos direcciones diferentes, de forma independiente o simultánea. Normalmente son impulsados por engranajes helicoidales y por lo tanto ofrecen un movimiento más silencioso. Aunque el precio de estos dispositivos es generalmente más alto por unidad, el costo total del sistema será más económico debido al reducido número de piezas necesarias para realizar los diferentes movimientos. El motor doble TiMOTION TT1 es un ejemplo de esto.
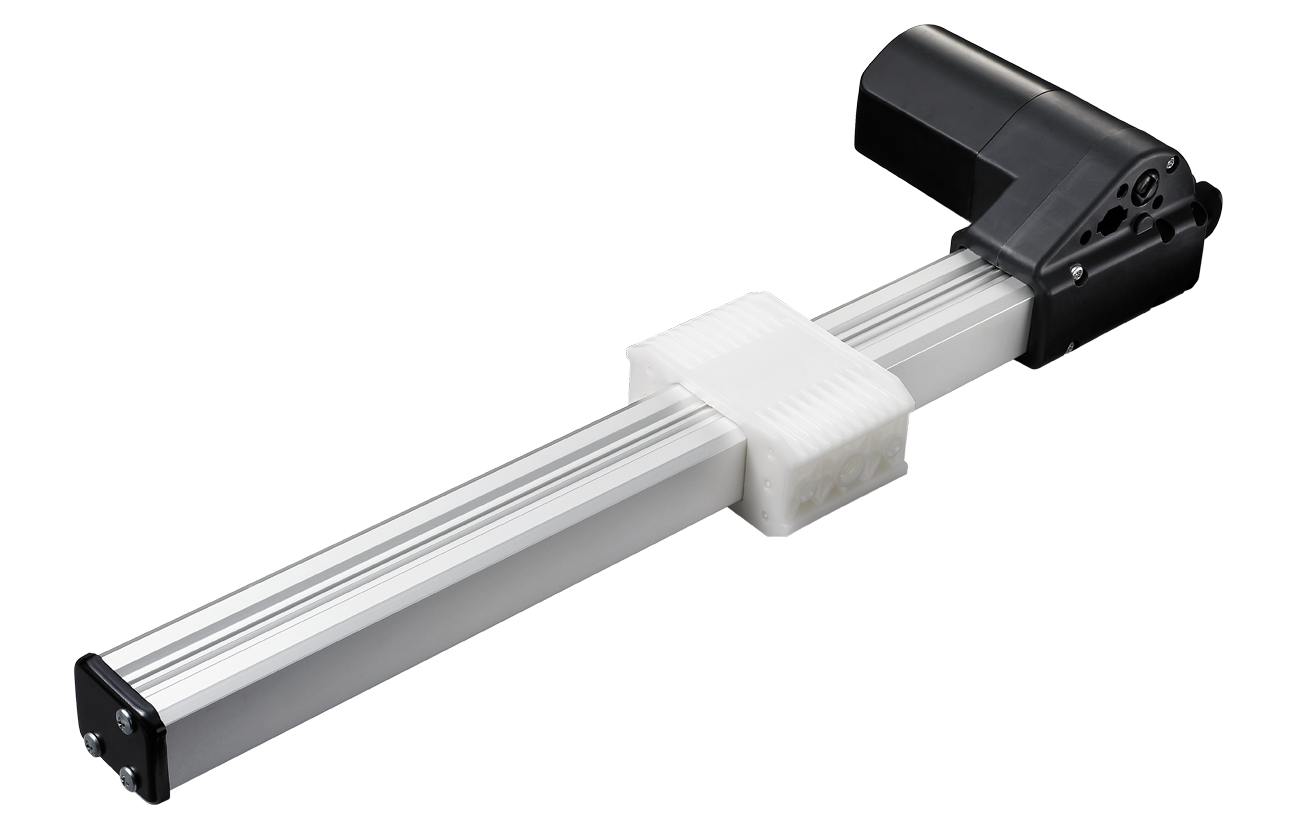
6. Actuadores eléctricos de tipo corredera
Los actuadores eléctricos de tipo corredera permiten un movimiento lineal sin necesidad de un tubo exterior. La fijación frontal está conectada a la tuerca que se mueve a lo largo del tornillo sin fin. Algunos ejemplos de actuador eléctrico de tipo corredera TiMOTION: TA5P.
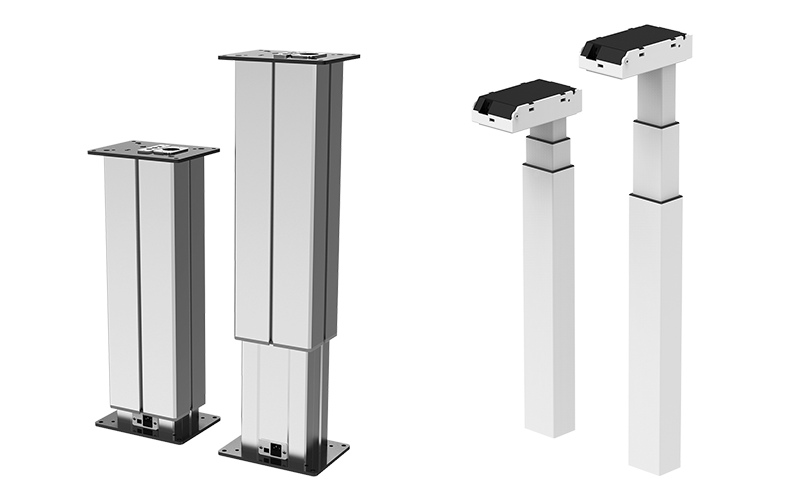
7. Columnas eléctricas elevadoras
TiMOTION fabrica columnas elevadoras para aplicaciones industriales, médicas y ergonómicas. Permiten el movimiento vertical de cargas altas manteniendo un alto nivel de estabilidad. Nuestras columnas industriales y médicas están diseñadas para aplicaciones como camas médicas, camas bariátricas o estaciones de trabajo industriales de altura ajustable. De esta manera, garantizan la seguridad y la comodidad de todos los usuarios. Algunos ejemplos de columnas eléctricas TiMOTION para aplicaciones industriales y médicas: TL3, TL17, TL27, TL10H, TL18AC.
TiMOTION también ofrece una gama de columnas ergonómicas compatibles con BIFMA para escritorios de altura variable. Ofrece diferentes colores, formas y orientaciones, así como un diseño de 2 o 3 pisos. Algunos ejemplos de columnas ergonómicas TiMOTION para escritorios de altura ajustable: TL4, TL5, TL7, TL9, TL13, TL14 y TL15.
¿Cómo elegir el actuador eléctrico adecuado para su aplicación?
Elegir el actuador eléctrico adecuado es la clave de cualquier proyecto de automatización exitoso. Hay muchos modelos de actuadores con motor paralelo, en forma de L, en paralelo, que pueden ser utilizados en muchas aplicaciones.
Cada necesidad corresponde a un proyecto único. Para poder elegir correctamente el actuador, hay que tener en cuenta la aplicación y sus limitaciones técnicas: velocidad, carga, ciclo de trabajo, espacio disponible y entorno, entre otras.
1. Determinar la carga requerida
La carga que debe soportar es un factor determinante en la elección del actuador y definirá sus distintos componentes (motor, tuercas, roscas, engranajes, cojinetes de bolas, etc.).
Es importante determinar en qué dirección debe actuar el actuador (tracción, empuje, movimiento vertical u horizontal) y sobre qué longitud.
También dependerá del diámetro de los tubos internos y externos del actuador. Todos estos factores influyen en la capacidad del actuador para levantar cargas y tienen un impacto en su resistencia.
2. Determinar la velocidad requerida
La velocidad deseada es un criterio fundamental en la elección del actuador.
No todos los mecanismos o materiales son compatibles con las altas velocidades. La alta velocidad con una carga elevada puede causar un desgaste prematuro del actuador e impactar en su vida útil. Por lo tanto, cada dispositivo tiene una velocidad y una carga que no debe ser excedida para protegerlo de daños materiales. Esta velocidad depende, entre otras cosas, de la rosca y de las características del motor.
3. Determinar el ciclo de trabajo
El ciclo de trabajo define la relación entre el tiempo de funcionamiento y el tiempo de reposo de un dispositivo, y varía considerablemente de una aplicación a otra. El ciclo de trabajo es un factor determinante en la elección del actuador, sus materiales y mecanismos. Le da al equipo una vida útil óptima y limita el rápido desgaste de las piezas mecánicas o el posible sobrecalentamiento.
Los actuadores eléctricos accionados por motores paralelos, por ejemplo, con sus engranajes rectos, soportan un ciclo de trabajo más alto y pueden tener un mayor número de ciclos.
4. Determinar el espacio disponible
La elección del actuador también se basa en el espacio disponible en el sistema.
Además de la carga, la carrera y la velocidad, es importante considerar si el actuador tendrá que operar en un espacio restringido, si hay alguna restricción en cuanto a los requisitos de espacio para permitir su integración en la aplicación.
Por ejemplo, los actuadores eléctricos en paralelo, debido a que el motor está en paralelo con el tornillo, son más compactos y por lo tanto ideales para espacios de instalación restringidos. El tamaño de un actuador depende de la configuración de montaje (con motor en paralelo, en forma de L o con motor paralelo).
5. Determinar el entorno
El entorno en el que funcionará el equipo es un parámetro determinante en la elección del actuador eléctrico adecuado. ¿El equipo funciona en el interior o en el exterior? ¿Está sujeto a polvo, contaminantes sólidos o humedad? ¿Tiene que hacer frente a una limpieza intensiva con detergentes o a una limpieza de alta presión? Dependiendo de las necesidades ambientales, los materiales utilizados y los índices de protección (PI) utilizados no serán los mismos. ¿Requiere un funcionamiento silencioso? Los actuadores eléctricos en forma de L, por ejemplo, gracias a sus engranajes helicoidales de plástico, proporcionan un movimiento más silencioso, ideal para un equipo médico o doméstico.
Todo es variable, todo es adaptable...
La elección de un tipo de actuador eléctrico depende de muchos parámetros. Es importante elegir un actuador lineal que pueda cumplir con los requisitos de la aplicación.
Cada aplicación posee una lista de requisitos esenciales para elegir el actuador eléctrico adecuado. Sin embargo, el presupuesto también se tiene en cuenta en la constitución de un proyecto. Algunas limitaciones técnicas inevitables requerirán un presupuesto mayor. Lo importante es evaluar todos estos parámetros para crear el dispositivo más adecuado.
- Obtener enlace
- X
- Correo electrónico
- Otras aplicaciones
Comentarios
Publicar un comentario